车载毫米波雷达——全景概览

一、毫米波雷达概览
1)发展历程
毫米波雷达的发展历史非常悠久,早期主要用在军事和航空航天领域。
20 世纪 70 年代,毫米波雷达开始在汽车上测试。当时雷达尺寸比较大,处于摸索阶段。在 1973 年,德国 AEG-Telefunken 和博世公司共同研制汽车防撞雷达,由于价格昂贵、体积庞大等原因,导致项目终止。

图片来源:H. H. Meinel, “Evolving automotive radar – from the very beginnings into the future,” in 8th European Conf. Antennas and Propagation, 2014, pp. 3107-3114.
20 世纪 90 年代初期,24GHz 毫雷达 AEB 系统(VORAD)开始应用在美国的校车和长途巴士上。
早期,车载毫米波雷达采用机械扫描方案。例如,大陆发布的机械扫描雷达 ARS300。
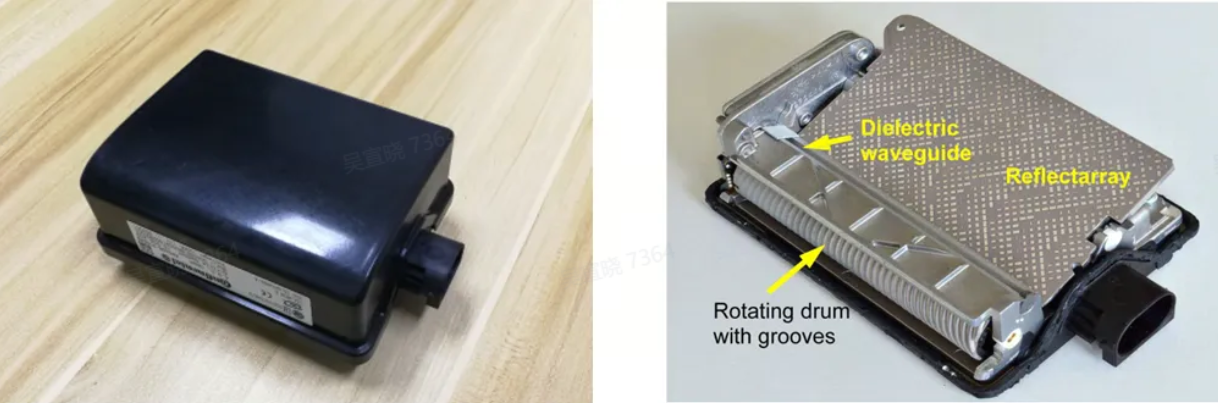
图片来源:Antenna Conceptsfor Millimeter-Wave Automotive Radar Sensors
2009 年,德尔福发布电子扫描雷达 ESR。
2020 年 9 月,大陆发布 4D 成像毫米波雷达 ARS540,并于 2021 年量产。
随着技术的发展,毫米波雷达的探测性能越来越高。
2)基本原理
1. 工作频段与信号体制
车规级毫米波雷达主要工作在 24GHz(ISM 频段,近距)和 77GHz(76-81GHz,主流中远距)频段。 目前主流采用 FMCW(Frequency Modulated Continuous Wave,调频连续波) 信号体制,相比脉冲雷达具有体积小、功耗低、距离-速度联合估计能力强的优势。
2. 核心测量原理
(1)距离测量发射线性调频信号(Chirp):s(t) = \exp\left(j2\pi\left(f_c t + \frac{1}{2}K t^2\right)\right) 其中 K 为调频斜率。 接收回波与发射信号混频后得到差频信号(Beat Frequency),其频率 f_b 与距离 R 关系为:R = \frac{c \cdot f_b}{2K}(c 为光速)
**(2)速度测量(多普勒效应)**运动目标会产生多普勒频移 f_d = \frac{2v f_c}{c}。 通过多个 Chirp 的相位变化或 2D-FFT(Range-Doppler FFT)可同时解算距离和径向速度。
(3)角度测量
- 水平/俯仰角:采用数字波束形成(DBF)或 MIMO 虚拟阵列技术。
- 通过多接收天线接收信号的相位差(Phase Difference)计算到达角(AoA):\theta = \arcsin\left(\frac{\lambda \Delta\phi}{2\pi d}\right) 其中 d 为天线间距,\lambda 为波长。
3. 典型信号处理流程
- ADC 采样 → 去斜(De-ramp)
- Range-FFT(距离维)
- Doppler-FFT(速度维)
- CFAR(恒虚警检测) + 角度估计(MUSIC / ESPRIT / 2D-FFT)
- 目标跟踪(Kalman / IMM 滤波) + 点迹凝聚
4. 4D 成像雷达技术要点
传统 3D 雷达(距离-速度-水平角)通过增加垂直通道数(级联或高密度 MIMO)实现俯仰角估计,从而输出具有高度信息的稠密点云,角度分辨率可达 1° 以内,大幅提升静态目标检测与目标分类能力。
3)分类
- 按照波段
车载毫米波雷达常用的是 24GHz(K 波段)、60GHz(V 波段)和 77GHz(W 波段):
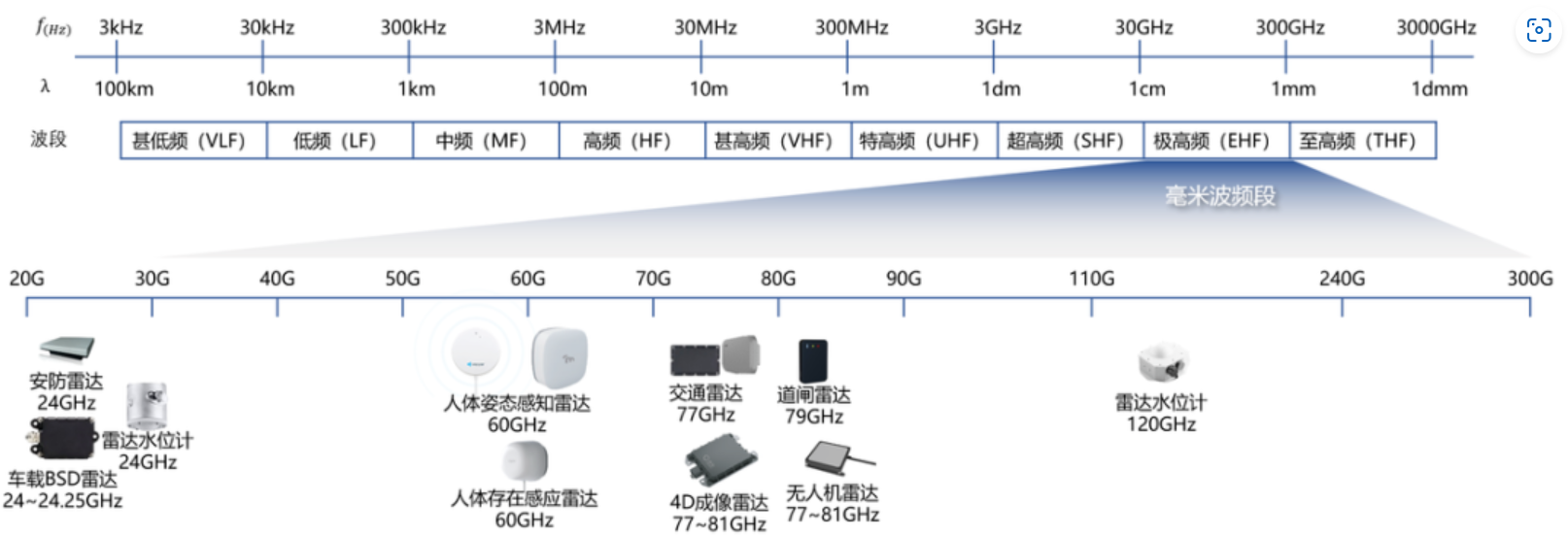
图片来源:工信部、AIoT星图研究院
- 24GHz 雷达:由车载转向家居家电和其他工业领域,2026 年出货量预计在 1673 万颗。
- 60GHz 雷达:主要用于舱内、门防撞等超近距车载场景,以及智慧康养等 AIoT 市场,2026 年国内出货量有望突破 500 万颗。
- 76-79GHz 雷达:这个是目前车载毫米波雷达最常用频段。
在车载领域,24GHz 逐渐淘汰,77GHz 频段已经成为主流。
- 按照测量性能
主要分为 3D 雷达、4D 雷达和 4D 成像雷达。
它们之间的性能区别、其他特征的对比:
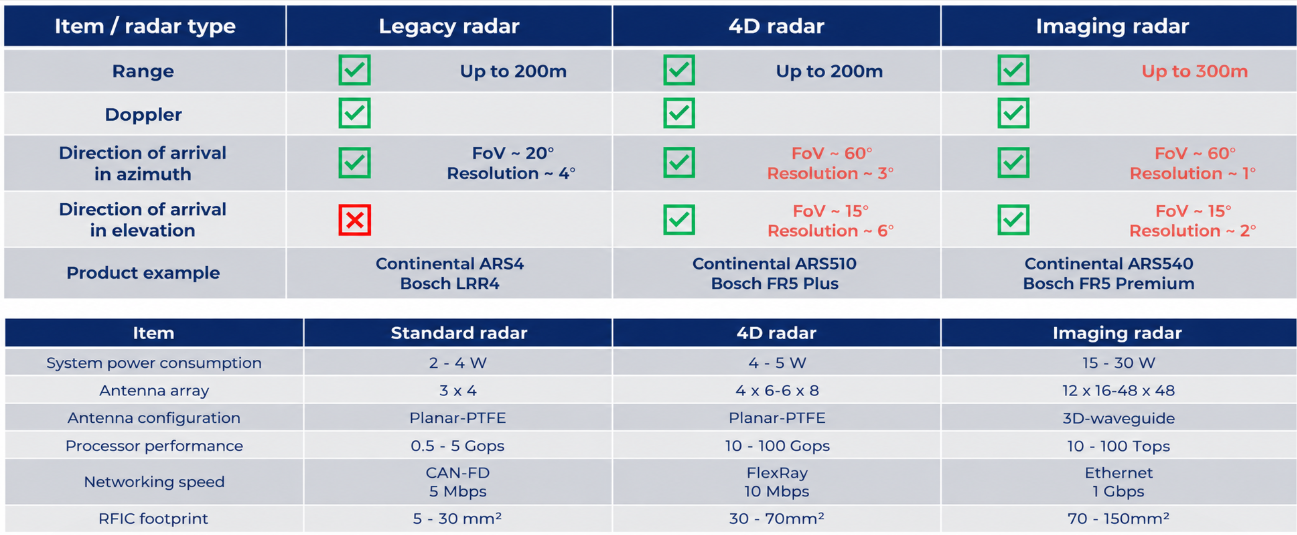
图片来源:Yole
- 按照调制方式
按照调制方式,主要分为 FMCW 和 PMCW 两种方式,这两种体制的原理对比:
其中,FMCW 是车载毫米波雷达应用最为广泛的调制方式。
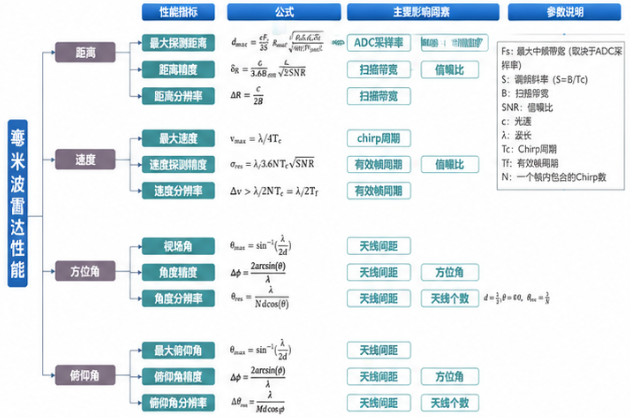
4)性能指标
对于车载毫米波雷达的探测性能,基本指标主要是:距离、速度和角度(水平角和垂直角)的范围、精度和分辨率。
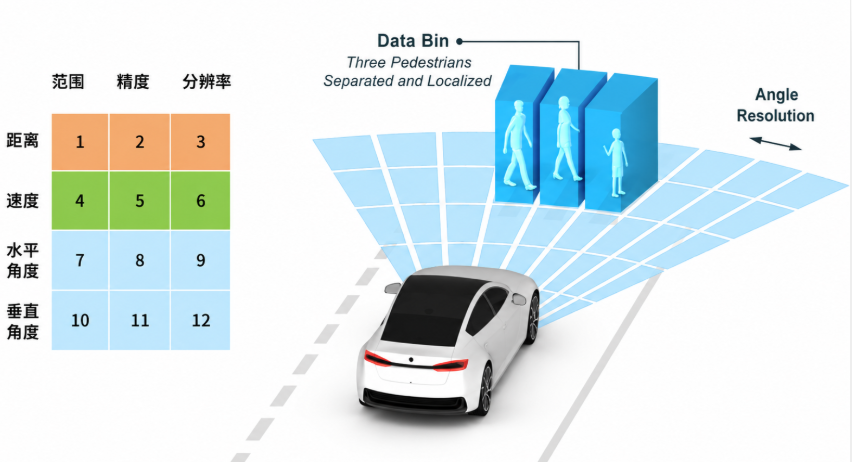
探测性能及其影响因素的关系:
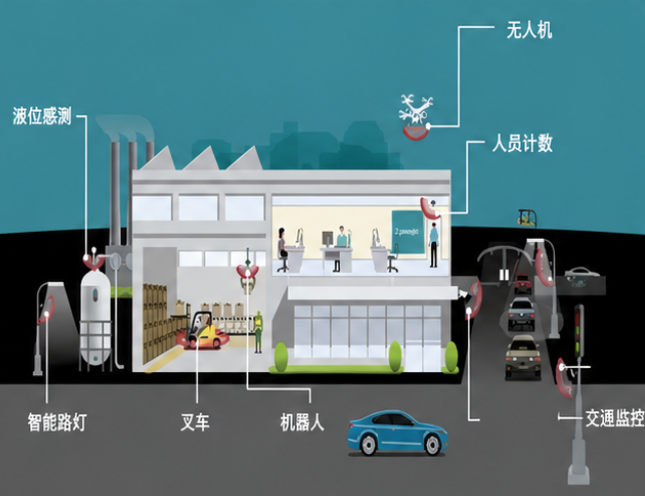
5)主要应用
毫米波雷达的应用非常广泛:

在民用方面,毫米波雷达可应用于智能车载、智能交通、以及机器人、无人机、智能家居、工业测量仪器、全屋智能、家电照明、消费电子等多个领域。
在车载方面,分为舱内和舱外(前雷达、后雷达、角雷达、门雷达):

图片来源:GGAI、头豹、AIOT星图研究院
二、性能分析
1)毫米波雷达和其他传感器的性能对比
毫米波雷达和相机、激光雷达和超声波雷达的性能对比:
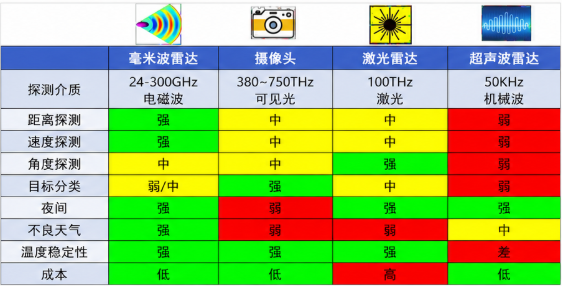
图示如下:
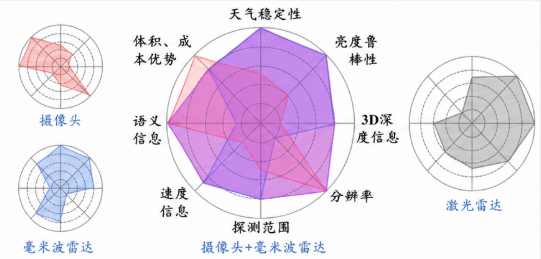
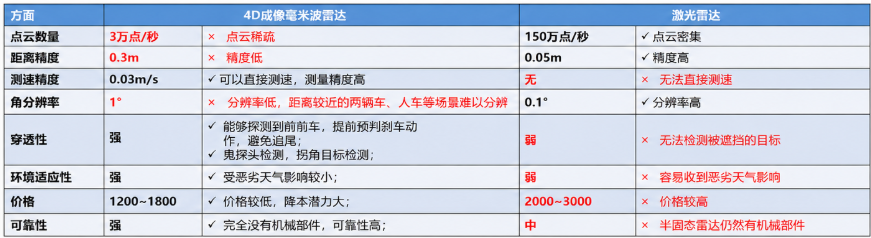
其中,4D 成像毫米波雷达和一般 dToF 激光雷达的对比:
2)毫米波雷达的主要弱势场景
- 多径
在环境较为复杂时,由于电磁波的多次反射,导致在真实目标的周围出现多个虚假目标。多径是毫米波雷达在实际应用中,非常常见的问题之一。
- 干扰
当雷达受到外部电磁波干扰时,会经常出现漏检或者误检。外部电磁波干扰主要来自于道路上其他车载雷达的电磁辐射。当外部干扰的电磁波频段落入雷达的扫频范围,但是频率变化和雷达不同步,此时雷达本体的噪底会被提升,由于 SNR 变差,从而导致 RCS 较小的目标消失(漏检)。
如果干扰信号扫描是同步的,此时会产生虚假目标(误检)。
- 分辨率不足
分辨率较低,是毫米波雷达出现误检漏检的另一大重要原因。
例如,对于前后相距较近的橙色和浅蓝色目标无法区分,感知会输出一个大的深蓝色目标。
以及,当行人站在车辆或者金属护栏旁边时,行人目标无法被检测。
3)车辆适配
该章节主要包括:整车开发流程、毫米波雷达评价指标、零部件开发,以及常见问题。
02
核心技术
-
硬件设计
该章节主要包括硬件架构、天线、高频板材、毫米波雷达芯片等关键设计技术。
射频链路包括很多组件,例如调制器、检波器、功率放大器(AMP)、低噪声放大器(LNA)、混频器、滤波器及压控振荡器(VCO)等等,实现毫米波信号的调制、发射、接收及解调功能。
-
软件设计
毫米波雷达的软件比较复杂,通常分为信号处理和数据处理两部分。
主要包括:
- 距离 FFT:通过低维实数 FFT,获得目标的距离信息。
- 多普勒 FFT:通过高维复数 FFT,获得速度信息。
- 非相干累加:将接收通道的数据做求模累加,最后得到幅值矩阵。
- CFAR 目标检测:通过横虚警率计算出噪声阈值,从而区分目标和噪声。
其中:
- 距离维:对于单个 Chirp 信号来说,信号包含了(距离/速度)信息,但以距离为主(由于时间非常短,忽略速度,或者后面增加补偿),可以通过 FFT 直接求出距离信息。
- 速度维:将距离微分成一个个距离单元。对于其中一个距离单元,我们以一个 Chirp 一个 Chirp 的时间轴来看,对该信号作 FFT 处理,即可求出其速度信息。
1)3D 毫米波雷达信号处理
2)4D 毫米波雷达信号处理
3)数据处理
数据处理是将点云处理为目标,包括聚类、跟踪、目标分类、融合、grid/freepace 等。
数据处理的核心功能是聚类、分类和跟踪。
- 聚类
DBSCAN 是一种常用的聚类算法,不过该算法对于相距较近的两个目标(例如汽车和其旁边的行人),经常出现异簇合并,以及大车出现同簇分裂。
一些新的聚类算法被提出,用于提高算法执行效率或者改善聚类效果,比如多帧联合聚类(ICP)、分阶段二次聚类,或者基于 Kd-tree 的加速聚类算法。
- 分类
聚类后,可以得到目标基本信息,比如目标位置(x,y,z)、点云数量、长度、宽度、高度、体积、投影面积、RCS、SNR 以及各种统计分布,如位置方差等。根据这些信息,可以对目标进行分类。
常见的分类方法有决策树模型、最近邻模型和支持向量机等。
分类之后可以针对特定类型的目标,优化处理算法。例如,针对客车和行人可以采用不同的跟踪和滤波算法,以提升雷达的检测和跟踪效果。
- 跟踪
目标跟踪算法主要包括航迹起始、跟踪滤波和数据关联等三大核心技术。
- 航迹起始:有逻辑法(滑窗法)、直观法、Hough 变换法。
- 跟踪滤波:采用卡尔曼滤波,例如 KF、EKF、UKF、CKF。
- 关联算法:有单目标采用 NN、PDA,多目标采用 JPDA、匈牙利匹配。
4)深度学习技术的应用
高性能毫米波雷达点云数量大幅增加(例如 4D 成像毫米波雷达),基于规则的传统算法处理能力有限,深度学习算法是未来趋势(尤其是当算法运行在域控制器上时)。
PointPillars 网络利用 pillars(垂直 columns)的方式将 4D 毫米波点云转化为稀疏伪图像,使用 2D 网络进行特征的学习,使用 SSD 检测头进行 bbox 的回归。
CenterRadarNet 是一个专为 3D 目标检测和跟踪而设计的综合框架,特别利用 4D FMCW 毫米波雷达张量作为其输入。
该架构由三个主要组件组成:用于特征提取的 Conv3D 主干,用于精确目标识别的专用目标检测和 appearance heads,以及在线跟踪器。
另外:NXP、Arbe、大陆、博世、安波福、高通等,都在研究使用深度学习技术,提升毫米波雷达的聚类、跟踪、分类、自定位、假目标滤波等功能性能。
-
热点技术
1)4D 成像技术
4D 成像毫米波雷达相对于一般 3D 毫米波雷达,性能有大幅提升。
4D 成像毫米波雷达有多种实现方案,例如多片级联、专用芯片、软件方案等等。
4D 成像雷达通常拥有较多的收发通道(从 100 多到 2000 多个虚拟通道)。目前主流产品是采用多片 MMIC 级联(例如 NXP、TI 等)或者专用芯片组方案(例如 Arbe、Uhnder 等)。
目前国内外几乎所有的毫米波厂商,都在布局 4D 成像毫米波雷达产品。
2)PMCW 技术
PMCW(Phase Modulated Continuous Wave,相位调制连续波),采用诸如二进制码等编码方式,对载波进行相位调制,通过发射、接收和处理,进而获取目标距离、速度以及角度信息。
FMCW 和 PMCW 的方案对比:
PMCW 可以实现更好的抗干扰性能和更高的分辨能力。
3)卫星毫米波雷达
毫米波雷达开始从传统的“Smart Sensor”,向“中央计算雷达”(或者卫星毫米波雷达)演进。
卫星毫米波雷达仅实现 RF 射频前端和部分前处理,然后将较原始数据通过高速总线(ETH 或者 SerDes)传输给域控制器,之后在域控中完成剩余的后处理。
中央计算雷达的主要优势:
- 性能更高。射频前端做更多针对性的优化,提升前端数据的质量,例如提升 ADC 采样率、信噪比和功率。同时,在域控中,可以使用性能更好、更复杂的算法(例如超分辨和深度学习),实现之前在雷达本体内无法实现的功能,同时运行时间更短,帧率更高。
- 系统成本更低。由于雷达头仅传输原始数据,处理器和外围器件可以被剪裁,因此成本可以降低。雷达头可以直接通过 SerDes 线缆和以太网线缆供电(PoDL),减少电缆和连接器成本。
- 融合性能更好。可以采用类似视觉的“BEV”感知架构,将多个雷达原始信号统一处理,消除目标在不同雷达 FOV 边缘时的跟踪中断,降低误报和漏报。同时,能够更方便的将雷达原始信号和视觉图像、激光雷达点云进行前融合,提升整体感知性能。在端到端算法架构下,通过使用更原始信号的毫米波雷达信号(更少的信息损失),可能会带来更好的综合感知性能。
- 可维护性和可扩展性更高。毫米波雷达的主要处理软件部署在域控中,使得雷达算法的更新可以通过 OTA 更容易的实现,提高了可维护性和功能可扩展性。同时,在保证相同性能的情况下,由于域控端算法能力的提升,可以减小对于射频前端的需求,例如可以减少天线阵列的面积,从而减小雷达头体积,降低功耗,进而使得布置更为友好。
- 系统调试更容易。域控制器会直接接收毫米波雷达原始数据,开发团队获取这些数据将非常容易,例如自动传到云端或者备份在本地存储器中,从而大大提升毫米波雷达的开发和故障排查效率。
中央计算雷达的 MMIC 对于射频前端性能要求更高,而对于处理器的性能要求降低。目前 TI 和 NXP 均已经推出中央计算雷达的芯片解决方案:
4)MMIC 的演进
毫米波雷达芯片工艺经历了由最早的砷化镓(GaAs)工艺,到锗硅(SiGe)工艺,再到 CMOS 工艺的演进路径,在性能提升同时,推动车载毫米波雷达系统成本的持续下行。
- 早期,车载毫米波雷达芯片主要采用砷化镓(GaAs) 工艺,一个毫米波雷达中需要至少配备 7 到 8 颗以上的 RF 芯片。同时,由于工作在 24GHz 频段,毫米波雷达体积较大、价格昂贵。
- 2000 年初,锗硅(SiGe)工艺的发展,大大提高了毫米波雷达芯片的集成度,一个毫米波雷达只需要 2 到 5 颗 MMICs、1 到 2 颗 BBICs,成本下探到千元级别。
- 2017 年,TI 推出了基于 CMOS 工艺的高集成度 77GHz 毫米波雷达芯片,将前端 MMIC RF、DSP 和 MCU 三个模块集成在一个毫米波雷达 SOC 芯片上,显著降低了毫米波雷达成本,大幅拉低了车载毫米波雷达的硬件开发难度.
1)GaAs 工艺时代(1990-2007)
2007 年之前,射频部分无法使用硅材料制做,主要采用砷化镓(GaAs)。砷化镓工艺的材料成本和制造成本都比较高,对于生产线的要求也很高。同时,采用 GaAs 工艺制作的产品集成度也很低,成本非常高。
2)SiGe 工艺时代(2007-2017)
从 2009 年开始,SiGe 工艺逐渐代替 GaAs 工艺。SiGe 拥有硅工艺的集成度、良率和成本优势,使得前端射频芯片的集成度大幅提升。一个毫米波雷达只需要少量射频前端芯片,毫米波雷达系统成本大幅降低。
3)CMOS 工艺时代(2017 年至今)
最初 CMOS 工艺制程较低,不能工作在高频中。例如以 180nm 制程为例,SiGe 可以工作在 180GHz 以上,而 CMOS 工作频率只能达到 40GHz。到了 2010 年,CMOS 工艺进步到 40nm,使得 CMOS 用于 77GHz 毫米波雷达成为可能。
CMOS 工艺处理速度更快,相对成本更低:
CMOS 的集成度能够进一步提升,一个毫米波雷达只需要 1 颗 MMIC 芯片,雷达整体系统成本进一步下降。
例如,BOSCH 的 MRR5,仅采用 1 片英飞凌的 SiGe BICMOS MMIC:RXS8160PL。
4)FD-SOI 工艺
FD-SOI(Fully Depleted Silicon-on-Insulator,全耗尽绝缘体上硅)是一种先进的半导体制造工艺,它结合了平面晶体管结构和全耗尽工作特性。这种技术依赖于一种独特的基板,该基板具有超薄的顶层硅层和埋氧层(BOx),从而实现了更好的栅极控制和更低的漏电流。
与传统的 CMOS 工艺相比,FD-SOI 在 28nm 及以下节点可以实现更高的性能和更低的功耗:
- 性能高:FD-SOI 衬底提供了更高的跨导(Gm)和截止频率(Ft/Fmax),从而提高了晶体管的性能。FD-SOI 晶体管具有较低的栅极电容和电阻,从而降低了噪声。同时,无掺杂硅通道提供了更好的线性度,适用于高功率应用。
- 可靠性高:FD-SOI 技术可以将软错误率降低到普通 CMOS 工艺的 1/100,从而提高系统的可靠性和稳定性。
- 功耗低:通过薄埋氧层和反向体偏置技术,FD-SOI 衬底可以显著降低漏电流,实现更低的功耗。
- 集成度高、成本低:FD-SOI 技术可以将数字、模拟和射频模块集成在一个芯片上,降低集成难度和设计复杂性,减小系统尺寸并降低成本。
5)封装上装载
该技术在不同芯片厂的叫法略有不同,例如:
- TI 称为:Launch On Package,LoP
- NXP 称为:Launcher in Package,LiP
- 加特兰称为:Radiator on Package,ROP
封装上装载技术将信号从封装辐射元件直接传输到 3D 天线,从而实现高效的电磁信号传输,搭配 3D 波导天线,可以提供更出色检测性能。
封装上装载技术具有多个优势,包括:
1)LoP 可以实现较低的转换功率损耗,SNR 性能更好。
2)热管理更容易:采用 LoP 技术时,发射元件位于封装的底部,因此可在顶部放置散热器来实现热管理。
3)辐射隔离性能更好:采用 LoP 技术时,发射元件位于封装的底部,因此可以降低 EMI/EMC 问题,因为 3D 天线放置在 PCB 的一侧,毫米波集成芯片位于 PCB 的另一侧,从而增强从 MMIC 到 3D 天线的隔离。
4)成本更低:微带贴片天线需要高质量、低损耗的昂贵 PCB 材料。然而,对于 LoP 3D 天线,PCB 可以使用较为便宜的基板制成。因此,LoP 技术可以在传感器级别带来成本优势,节省 PCB 成本。同时,由于无需微孔以及减少 PCB 接地层的潜在数量,可以进一步减少 PCB 总层数,节省 PCB 成本。
5)灵活性更高:采用外部 3D 天线的 LoP 技术时,可在多个不同的毫米波雷达之间,实现复用 PCB 设计,仅通过更换波导天线,就可以实现不同视场角的毫米波雷达。具有较少 PCB 型号的雷达传感器设计,可以实现单个 PCB 更高的产量,从而减少物料管理费用,并降低成本。此外,由于采用非优质射频基板,市场上有更多的 PCB 供应商可供选择。